V90 PTI 固件版本 1.05 以上开始,伺服驱动器提供了 Modbus RTU 通信功能。PLC可以通过Modbus的FC3及 FC6功能代码读取或写入伺服驱动的寄存器,S7-200 SMART 可通过标准的Modbus功能块完成发送伺服驱动器的控制指令及读写驱动的参数。
1. 通信连接
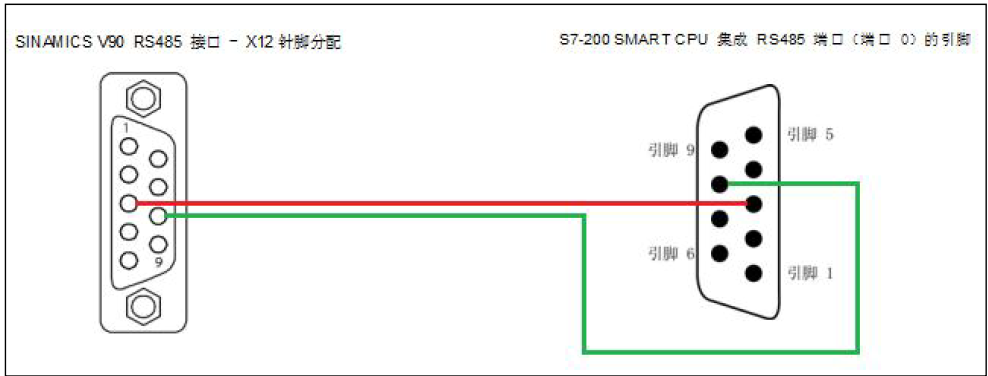
V90 伺服驱动通过 RS485 接口(X12)使用 MODBUS 协议与 PLC RS485 (端口 0) 进行通讯
2. 通过 Modbus 通信实现 V90 内部位置控制的 MDI 功能控制
(1) V90 Modbus 寄存器说明
对于不同固件版本V90 PTI,内部控制的控制数据寄存器是不同的。
对于FW V1.07及后续版本:
| 寄存器编号 | 描述 | 单位 | 定标系数 | 范围 |
| 40100 | IPOS控制模式控制字 | |||
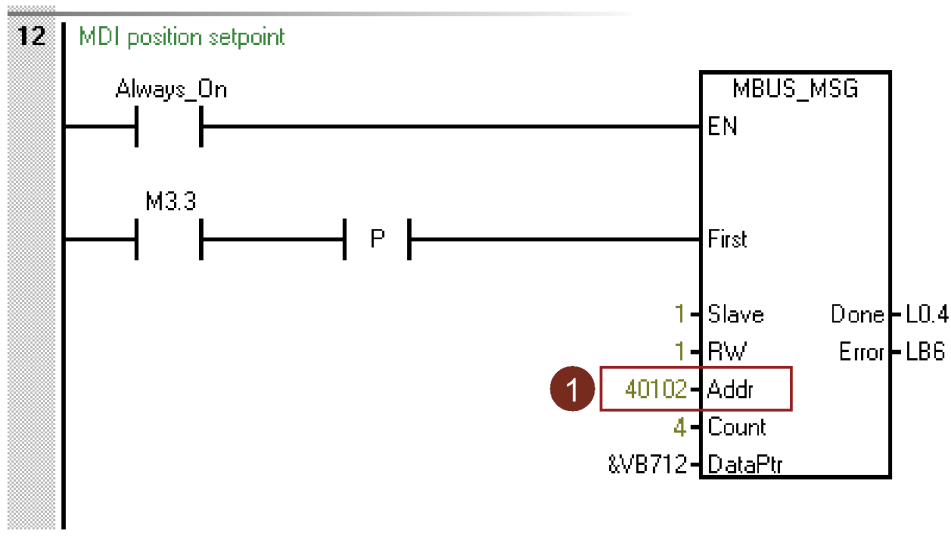
| 40102 | MDI 位置设定值高字 | LU | 1 | -2147482648 至 2147482647 |
| 40103 | MDI 位置设定值低字 | |||
| 40104 | MDI 速度设定值高字 | 1000 LU/min |
1 | 1 至 2147482647 |
| 40105 | MDI 速度设定值低字 | |||
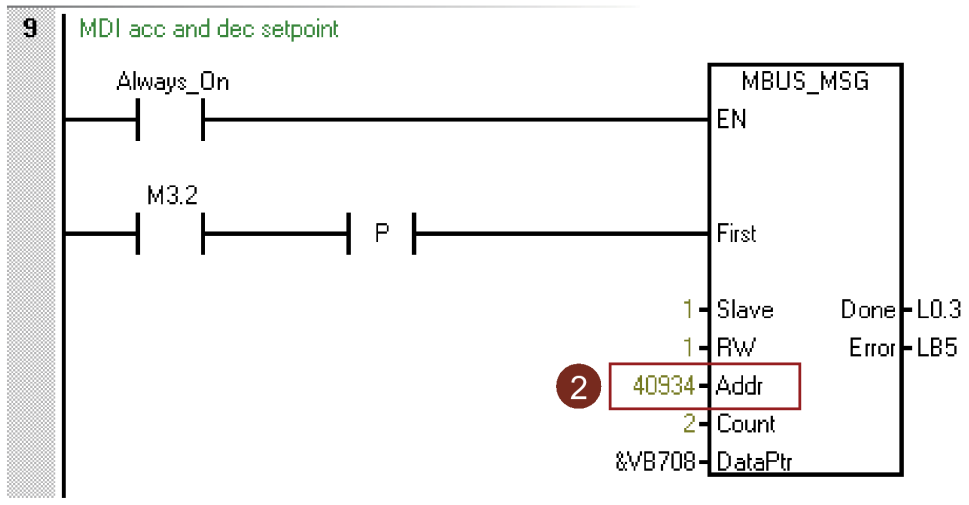
| 40934 | MDI 加速度倍率 | % | 100 | 0.1 至 100 |
| 40935 | MDI 减速度倍率 | % | 100 | 0.1 至 100 |
对于FW V1.07以前版本:
| 寄存器编号 | 描述 | 单位 | 定标系数 | 范围 |
| 40100 | IPOS控制模式控制字 | |||
| 40102 | MDI 位置设定值高字 | LU | 1 | -2147482648 至 2147482647 |
| 40103 | MDI 位置设定值低字 | |||
| 40932 | MDI 速度设定值高字 | 1000 LU/min |
1 | 1 至 2147482647 |
| 40933 | MDI 速度设定值低字 | |||
| 40934 | MDI 加速度倍率 | % | 100 | 0.1 至 100 |
| 40935 | MDI 减速度倍率 | % | 100 | 0.1 至 100 |
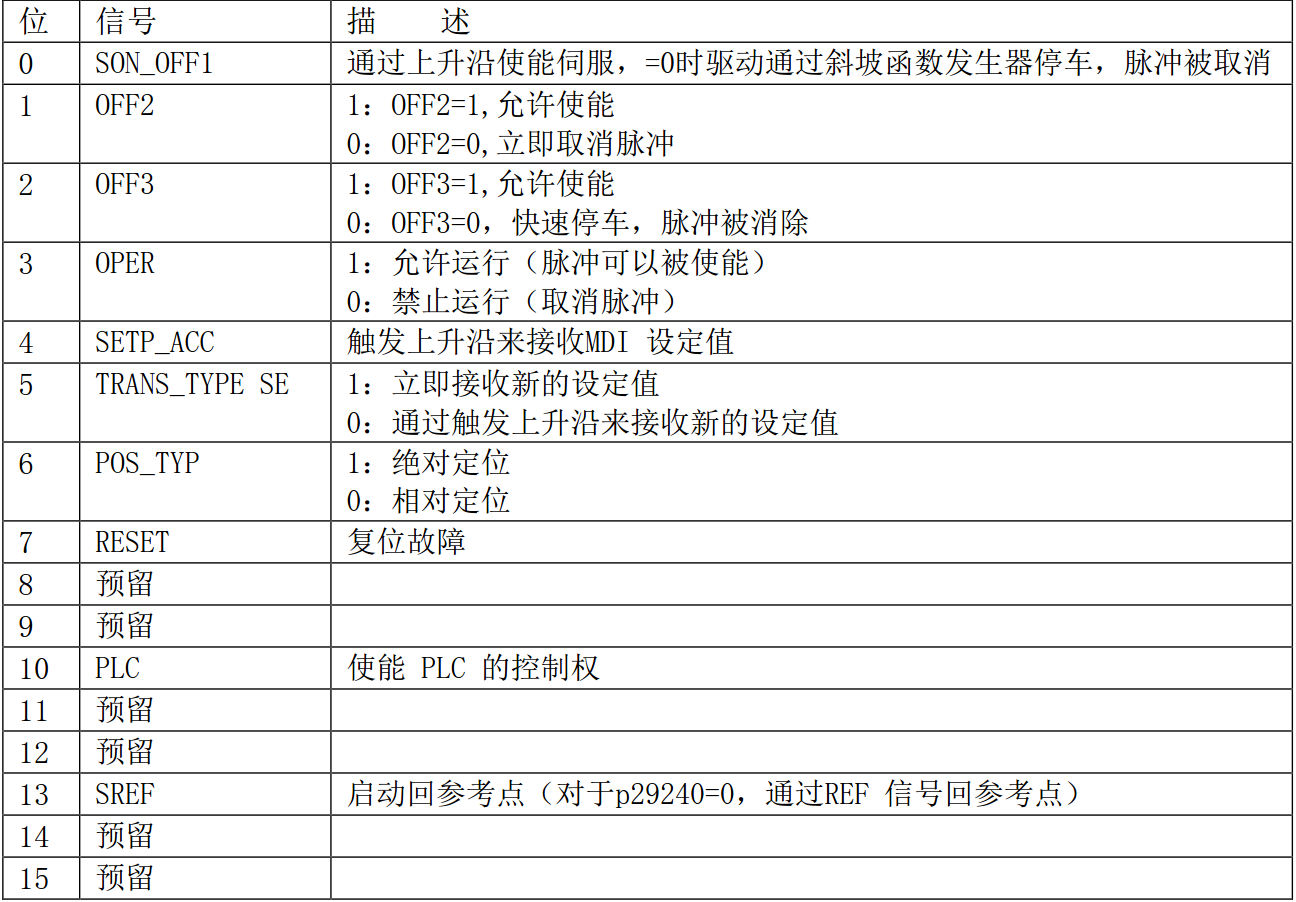
IPOS控制模式寄存器 40100控制字的定义:
3. V90参数设置
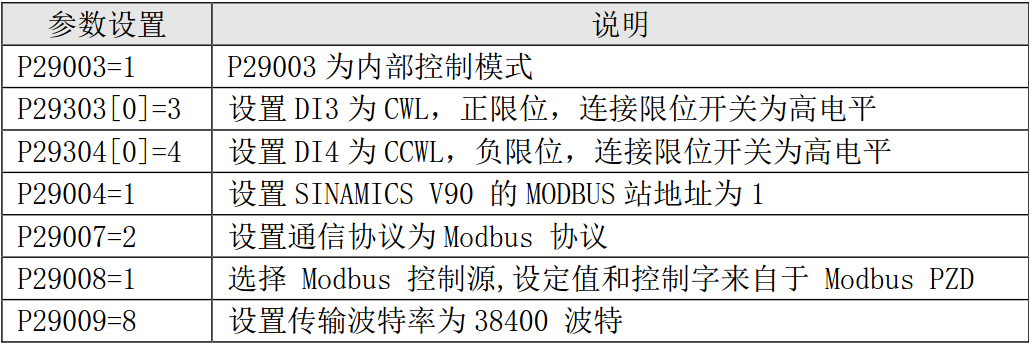
按照下表设置伺服驱动器的相关参数:
4. PLC 的编程
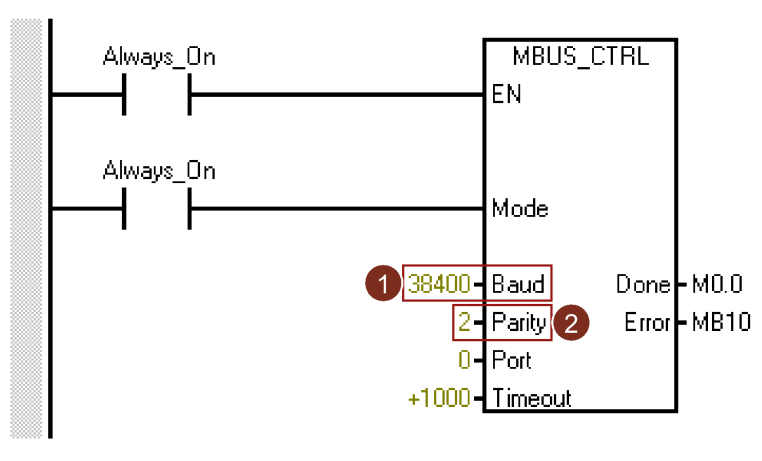
1.初始化Modbus通信接口,需确保 PLC 的波特率与驱动设置一致,设置 PLC 校验方式为偶校验(parity = 2)。
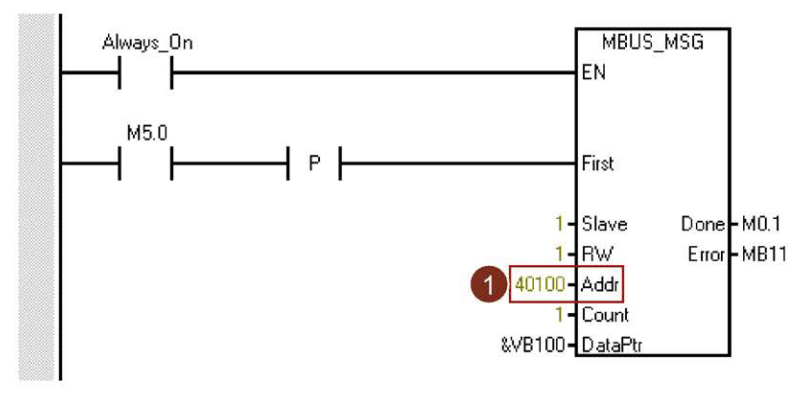
2.通过寄存器 40100 写入需要的控制字。必须设置寄存器 40100 的位 10 为 1 以允许PLC 控制驱动。使能驱动器,先将16进制数 40E 写入寄存器 40100 中,然后再写入40F。
3.如果需要对带增量编码器驱动执行回参考点操作,保持驱动为伺服使能状态,可通过写控制字 40100 第13位,执行回参考点操作。
4.通过MBUS_MSG功能块,将位置设定值、速度设定值及加速度减速度倍率写入寄存器 40102、40103、40104、40105、40934 和40935 中。
5.MDI相对定位的40100控制寄存器操作:
(1) 在IPos 控制模式中,控制字的位6=0选择相对定位模式(40F)
(2) 控制字的位5=0,设置使用上升沿来接收MDI 设定值(40F)
(3) 将寄存器写入需要的值 (如40934及40935写入十进制的10000(100%),40104/40105写入MDI速度值,40102/40103写入MDI的位置值) 后,通过PLC发送控制字的位4上升沿来接收设定值,驱动进行MDI运行(41F)。
MDI绝对定位的40100控制寄存器操作:
(1) 在IPos 控制模式中,控制字的位6=1来选择绝对定位模式(44F)
(2) MDI设定值的生效有两种:
MDI设定值立即生效: 控制字的位5=1,设置接收的MDI设定值立即生效(46F);
上升沿来接收MDI设定值:控制字的位5=0,设置使用上升沿来接收MDI 设定值(44F)
(3) 将寄存器写入需要的值 (如40934及40935写入十进制的10000(100%),40104/40105写入MDI速度值,40102/40103写入MDI的位置值)后,如果是MDI设定值立即生效,则驱动进行MDI运行。如果是通过上升沿接收MDI设定值,则通过PLC发送控制字的位4的上升沿来接收设定值(45F),驱动进行MDI运行。
![]() ModBus通信最多能带多少个站点?
ModBus通信最多能带多少个站点?
最多32个。